最上面的是zero bubble h1
第二张图是减少T_w之后的调度结果
第三/四张图是不考虑内存的调度结果
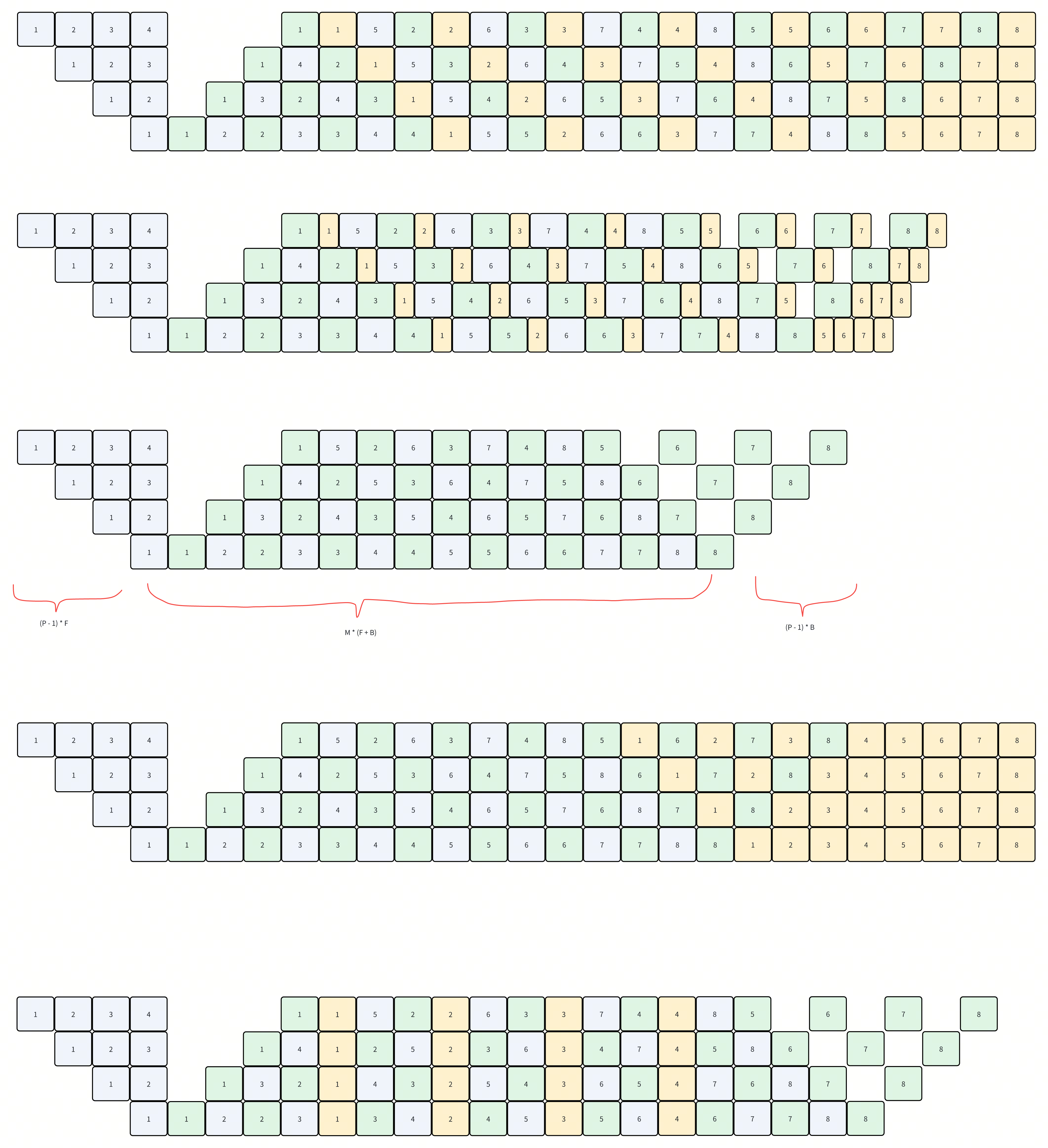
bubble的计算逻辑:
- 3是1F1B,不放置w的调度结果。可以看到执行时间是:
- M * (F + B) + (P-1) * F + (P-1) * B
- 考虑这里的关键我认为在于看最后一个stage,因为最后一个stage没有任何依赖,一直都是跑满的。
-
那么bubble size就是最后一个stage idle的时间,对应的就是图中的(P - 1) * (F + B)
-
这个就得到了1F1B的bubble size,把(B + W)带入B即可
-
拆分W后,因为W没有依赖(严格来说是必须在对应的B之后),所以考虑把W放到图三的后半段,就得到了图四
-
可以这样考虑bubble size的计算:
- 最后一个rank,每增加一段时间T,bubble size就减少T。因为最后一个rank是满速执行的,相当于增加了有效的执行时间。
- 按照公式算,bubble size = total - expectation = total - last_rank_execution_time。
- 对应的,因为total取决于最慢的first rank,所以每增加一段时间T,bubble size就增加T。
- 最后一个rank,每增加一段时间T,bubble size就减少T。因为最后一个rank是满速执行的,相当于增加了有效的执行时间。
-
对于上面图四,最后一个rank从头执行所有的W,所以有效时间增加了 m * W。而first rank额外执行了m - (p - 1)个W。所以total time增加了(m - (p - 1)) * W
- 之所以减掉了p - 1,是因为cool down阶段,有p - 1个空无法通过新的forward填上,就只能用W来填了。
-
实际上这里填的时候还应该考虑W的大小,比如如果W远小于F,那可以填很多的W。这里假设是1:1的,所以只能填p - 1个
-
最终计算出来bubble size就少了(p - 1) * W了。对于的就是论文中的式子
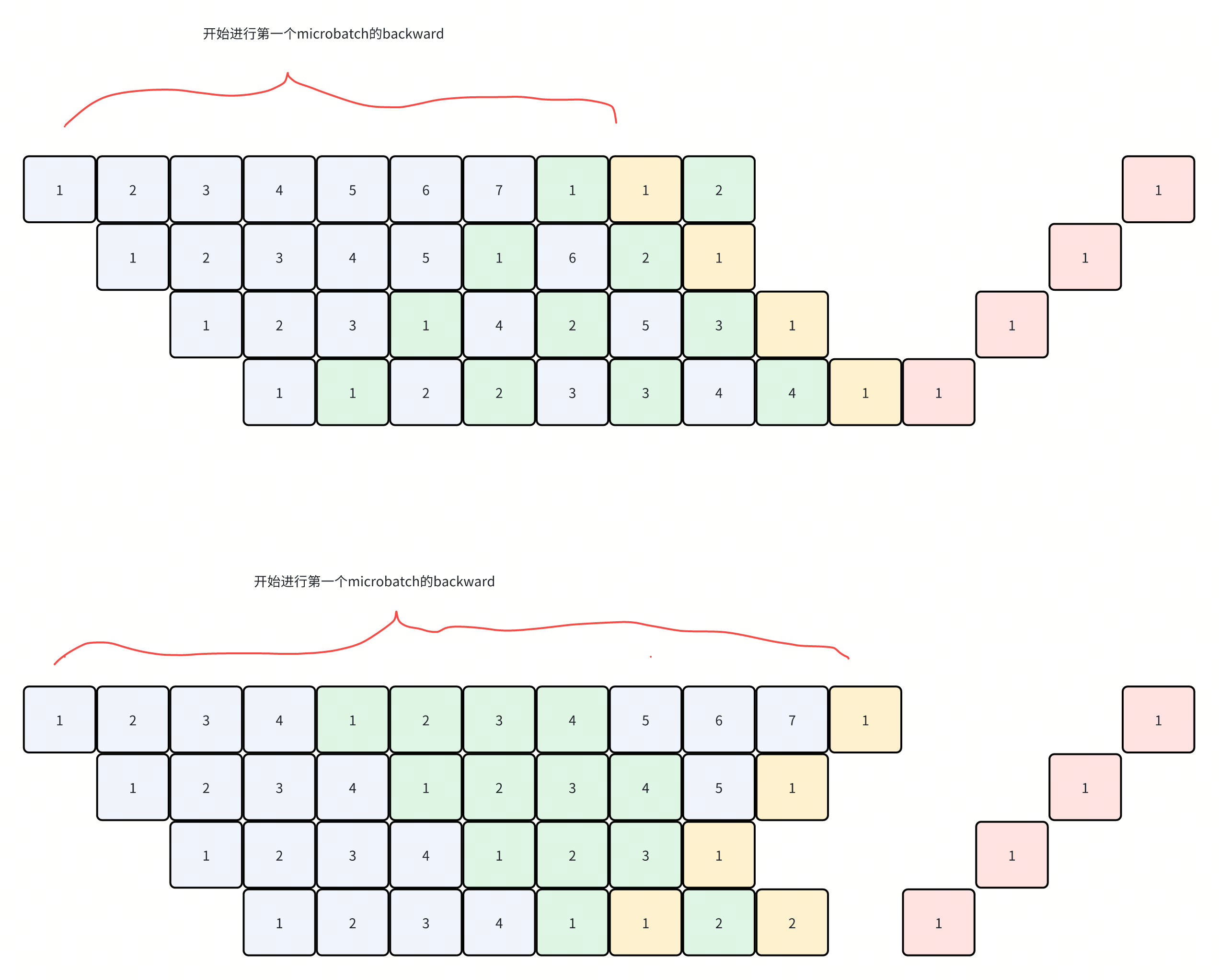
然后这里还有一个问题,就是图四并不是对应论文中的ZB-H1,因为我把所有的W都放到了最后,导致峰值内存会比较高。而原文中把W往前推。效果类似于延长了forward的执行时间,然后到cooldown阶段没有新的forward了之后,W的计算就变成了forward,来填补1F1B的空。
- 这里引入了一个问题,为什么是按照forward,为什么不按照其他的方法来放置W呢。
-
为了不影响依赖的话,直观感觉就是三种放置的方式:
- 跟着forward放,相当于延长forward时间
-
跟着backward放,变成了原本的1F1B
-
竖着放,相当于stop the world,所有人都停一会。这种实现起来应该比较复杂,微微一点优势就是提早算一下W。
-
所以这里选择了跟着forward放,并且跟着forward放的话,最后用W填充cooldown阶段的bubble理解也更加直观。
- 相当于steady state的时候, forward是F + W,cooldown阶段还有forward,forward是W
后面那个2W的还推导不出来。。
直观的理解就是:
- 上面的bubble中,剩下了rank0,在第一个backward之前的bubble。
-
之所以没有用forward填满,是有内存的限制。
-
发起更多的microbatch可以填满这里的bubble,最多需要2(p - 1)个。
-
填满之后,最终的调度的样子会成为ZB-H2的样子,此时如果有optimizer step的同步,还是会有固定的bubble。固定为(P - 1) * F。
- Optimizer step的同步主要是为了做NAN的检查,以及grad clipping。
- 解决方法就是先做optimizer.step(),然后再去做nan检查,以及grad clipping。因为文章中提到:
However, we noticed that most of the time the global states have no effects, e.g., the global check for NAN and INF rarely trigger because in a robust setting most iterations shouldn’t have numerical issues; the gradient clipping rate is also quite low empirically to justify a synchronization of global gradient norm at every iteration.
- 因为主要用的adamw这种,计算是可逆的,可以从前一个step回退回来
-
当optimizer的同步去掉之后,虽然执行时间上是错开的,但是每个rank都是满速,吞吐上也就是zero bubble了。
zero-bubble-v的这种,直观理解:
- 1F1B这种三角形的调度,内存的瓶颈主要在第一个rank上
-
改成一个v形状,这样第一个backward之后,可以立刻释放rank0的一部分内存。然后再进行第二个microbatch的forward
-
V形状的这种,用microbatch把第一个V填满(用2 * (p - 1)个)后,第一个microbatch进入到第二个virtual stage的时候,可以立刻做backward。后面的microbatch的第二个v stage不会被执行。内存也就压低了
-
而非V形状的,需要通过p - 1个microbatch把第一个梯形的区域填满,进入到第二个v stage,然后再需要2 * (p - 1)个microbatch填满这个区域,才会到第一个backward。
如图,因为图中每一个格子就是一个model chunk + 一个microbatch,所以可以认为内存都是一样的。
从图中的长度就可以看出来峰值内存占用的情况了
Exp
不过torch这里的实验结果看起来差不多
https://discuss.pytorch.org/t/distributed-w-torchtitan-training-with-zero-bubble-pipeline-parallelism/214420
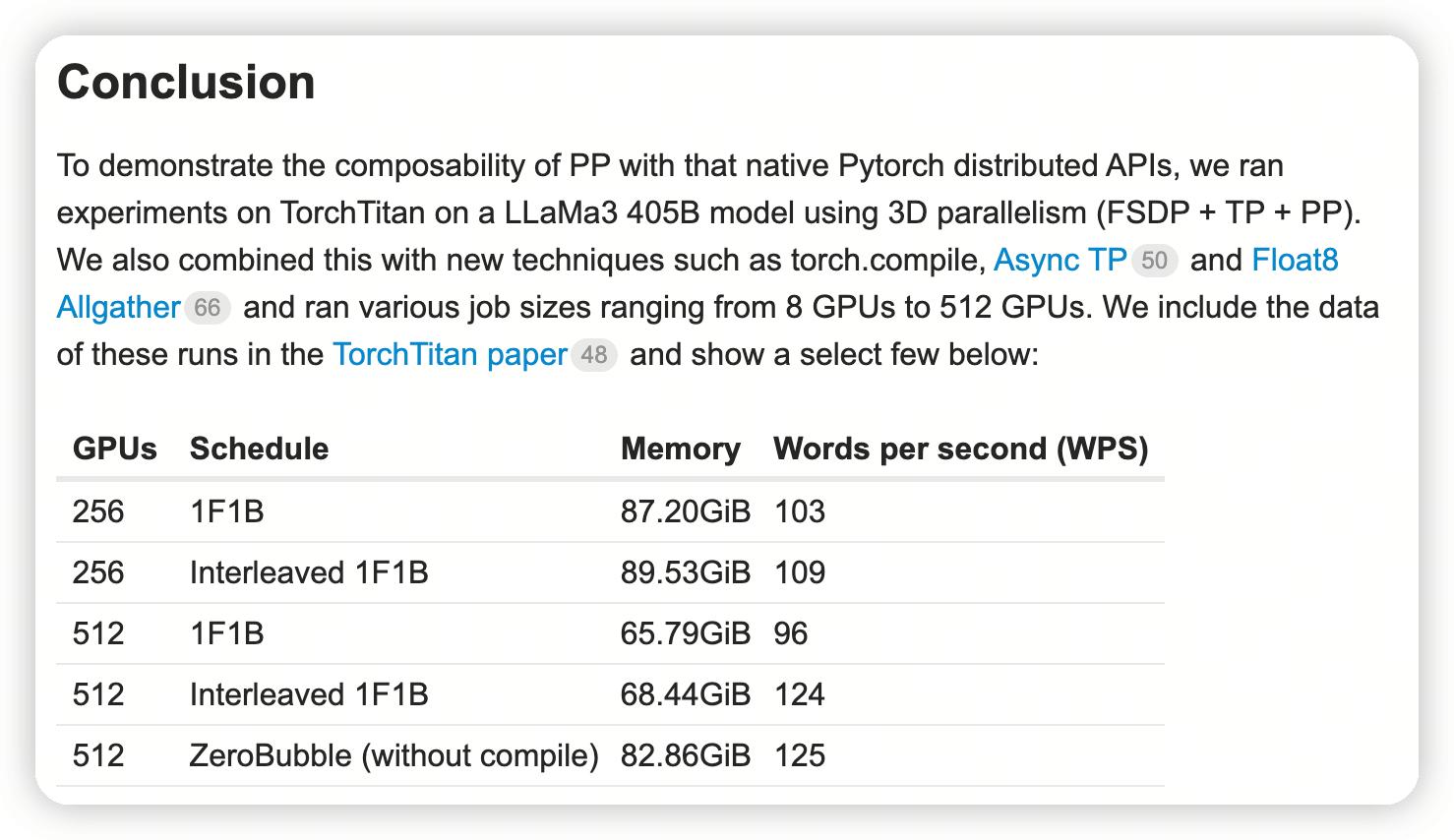
而且内存也高一些,不知道是什么情况。

文章评论