SSTable(1) data block
每次minor compaction都会生成新的sstable,major compaction会将若干个sstable合并成一个大的sstable。
这次我们看一下sstable的读写过程。参考文章在这里
一个sstable文件按照块划分,用来提高读写效率。每个块的大小为4kb,每个block中除了存储数据还有压缩类型以及校验码

sstable中不同的block有不同的功能
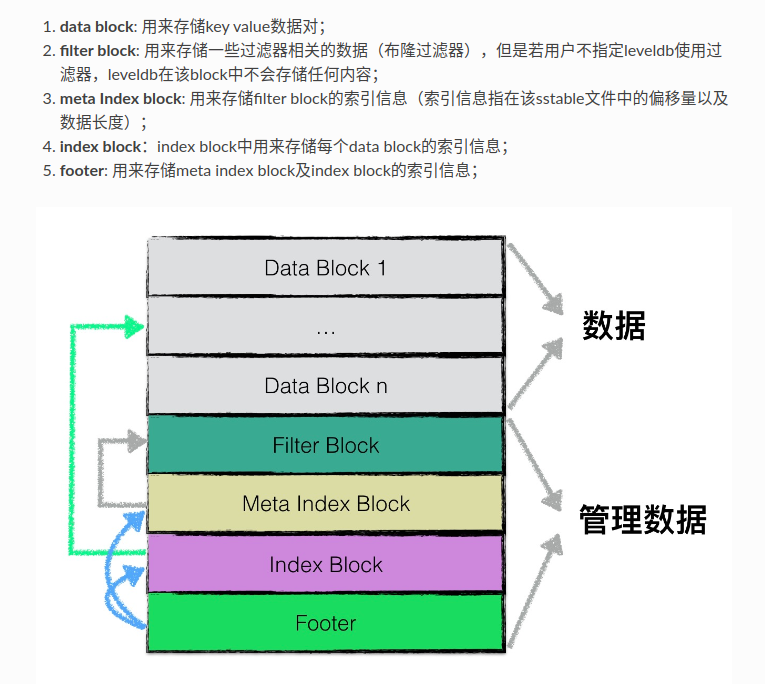
data block
由于leveldb是按序存储,所以我们会使用类似前缀压缩的技术。不同的是每若干个键后我们会重头存储一个完整的键,并称为restart point
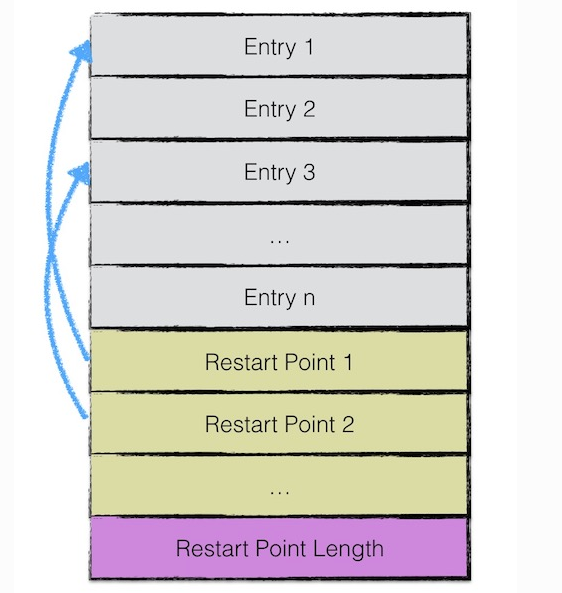
这样我们可以在restart point上进行比较,从而快速定位需要的数据块。然后顺序遍历并解压缩数据

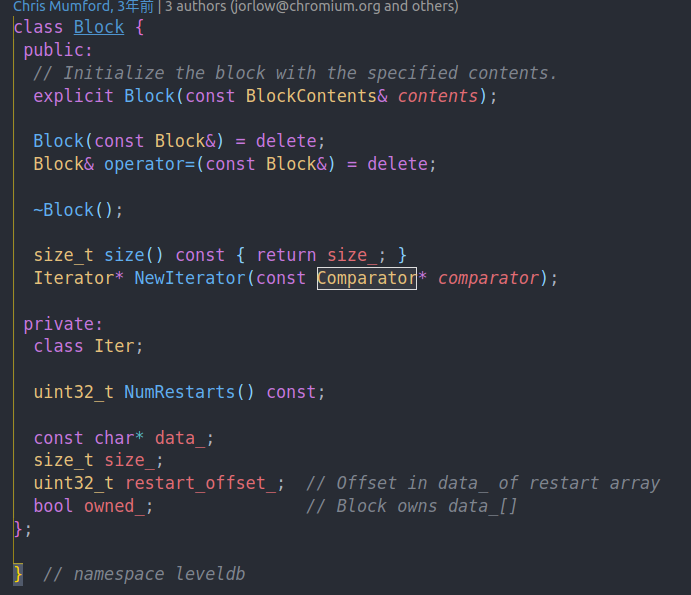
看一下代码。结构内部很简单,就是data以及size,owned表示我们是否拥有这个数据,是的话释放的时候就要delete掉这块数据。restart offset就是 上面图中的restart point数据的起点。

检查一下restart point的有效性。然后计算restart offset。每个restart point以及最后的length都是uint32。乘起来计算一下偏移量就行。
读取block的方法就是通过iterator来。所以只提供了NewIterator
具体的实现在block.cc中。继承的Iterator
由于SSTable是不可变的,所以我们可以随意存储data pointer
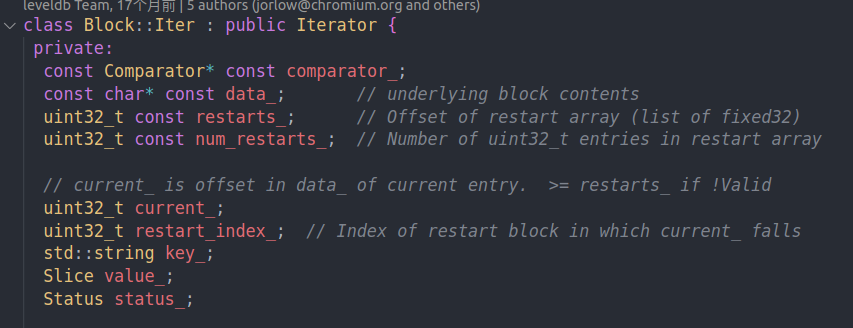
为了减少indirection,我们就直接把data_和一些必要的信息存在Iterator中了
移动迭代器的核心在current_和restart_index_上

并且由于SSTable不可变,所以我们移动迭代器的时候就可以直接把对应的kv也拿出来。不会涉及到额外的拷贝。
先看Seek
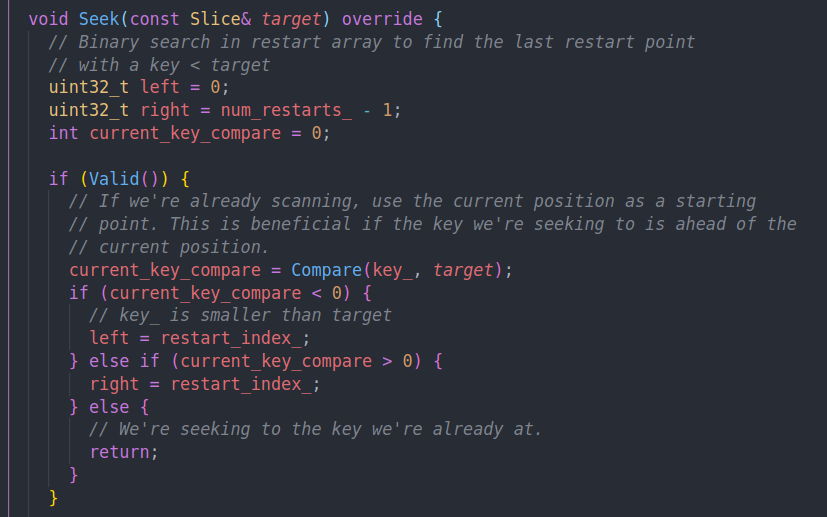
通过二分来找到最大的小于target的restart point,这样我们就可以从这个restart point开始。
最开始的这个判断是判断如果我们已经在扫描状态下,就可以复用一下当前的结果。从而缩短更新的区间。
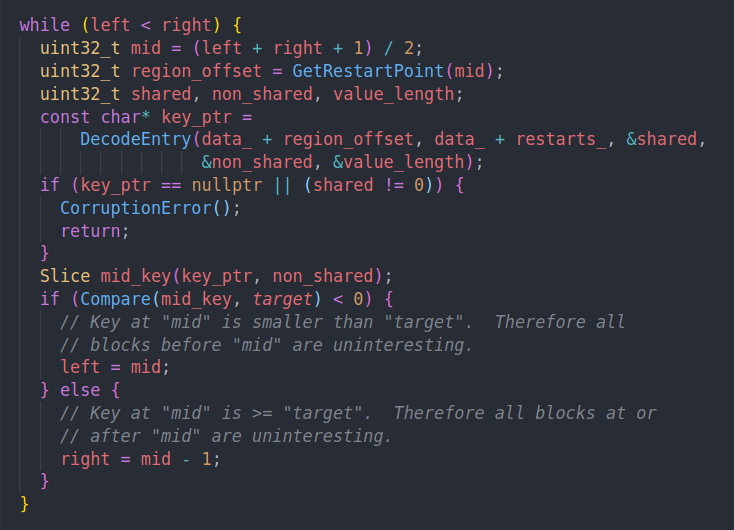
然后开始用二分,找到restart point并decode,根据结果去缩小区间。
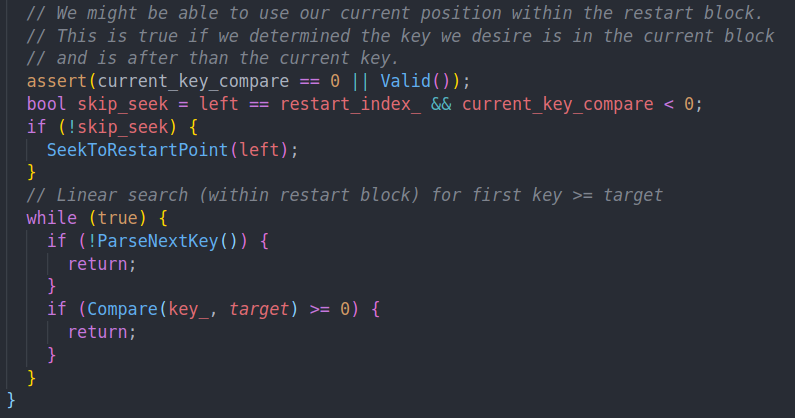
最后在块内线性遍历。直到找到第一个大于等于target的key。
上面那个判断是说如果我们复用了之前的结果,就直接从之前的起点处继续扫描,而不是回到restart point上扫描了。因为之前判断的key是基于current的,而不是restart point上的值。
这里有一个很细节的地方要注意,就是我们最后得到的left这个restart point,他自己的key一定是小于target的,而left + 1的这个点则是大于等于target的。所以我们准确扫描的区间应该是(left, left + 1]。而在下面linear search的时候,我们是先ParseNextKey,再去比较。所以是先获得下一个key,从而跳过了left。
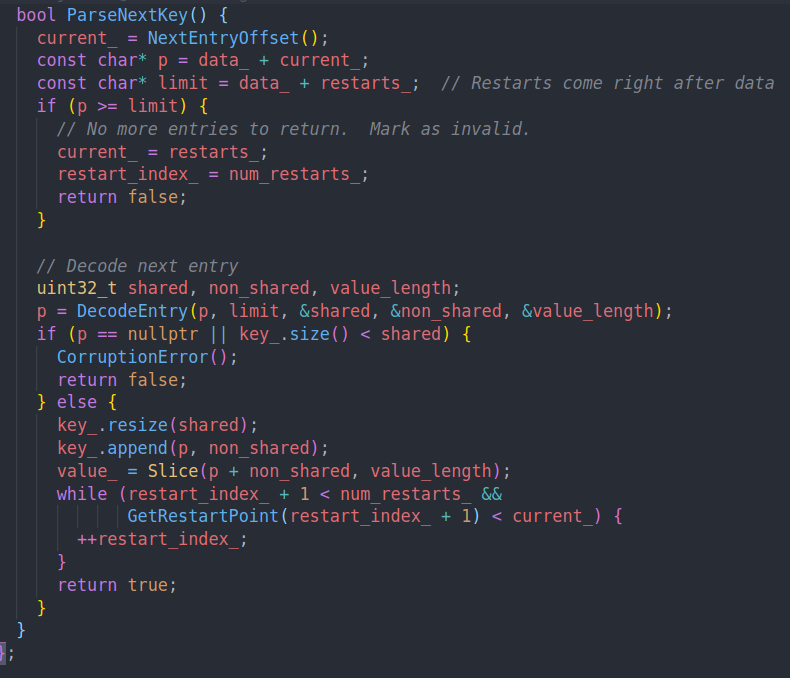
ParseNextKey会读取下一个key,并存储到key_中,这里的实现就是resize到shared上,然后append non shared个字节。
然后会判断如果我们跨越了restart point的话,就更新restart index。表示current所属的restart point区间。
剩下的移动也很容易。对于Next来说,就是调用ParseNextKey。而Prev的话则是记录当前的offset,然后从上一个restart point开始做线性扫描。
有一个很有意思的细节就是计算下一个entry的offset

current是当前key的offset,我们可以从中推导出next offset,但是通过value这种方法效率更高。利用了value是对当前block的slice的特性。

这里的实现中,更新了restart index后。直觉上来讲我们也需要更新current。但是我们每次调用ParseNextKey也需要更新current。所以他这里将这个职责留给了ParseNextKey。并且由于NextEntryOffset需要通过value来更新,所以这里我们只会设置一个特殊的value,然后在调用NextEntryOffset的时候,就会将offset更新为restart point的offset。
看完了读取然后看一下写入。我们是怎么构建data block的。具体在block_builder.cc中
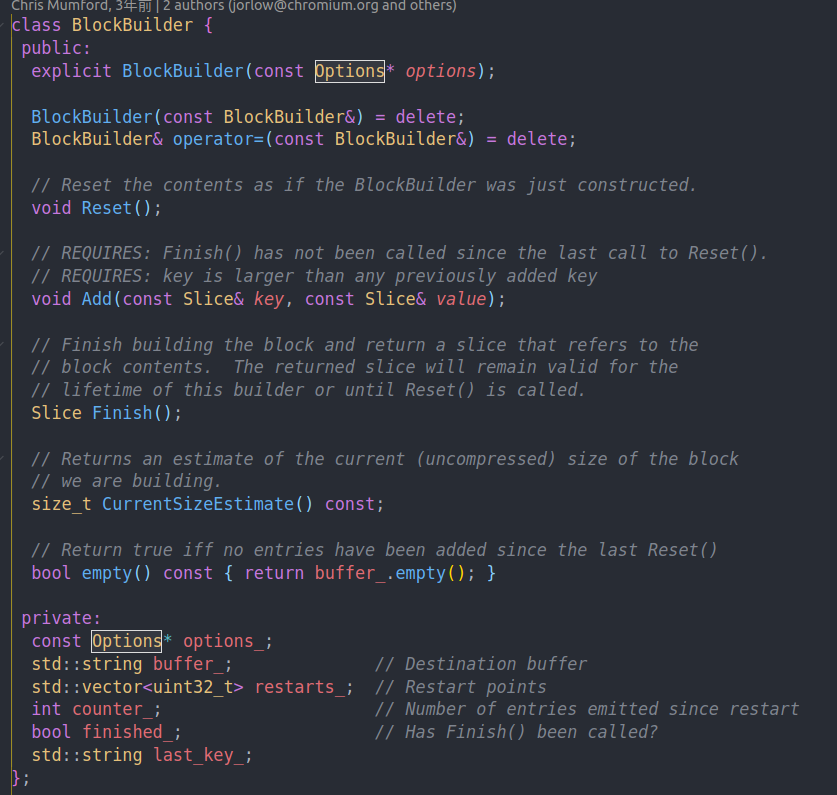
核心API就三个。Reset表示重新构建,Add添加一个kv pair,Finish则是结束构建并返回buffer
restarts记录了restart point。counter则表示现在有多少个数据加入了,从而让我们可以添加新的restart point。
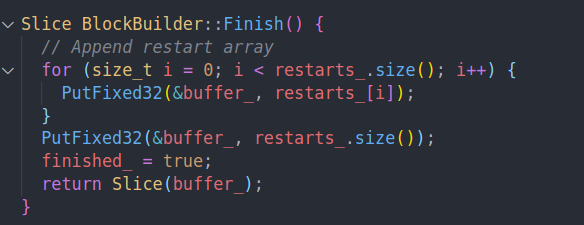
finshish就是将restart point的offset都写进去。最后写入restart point length
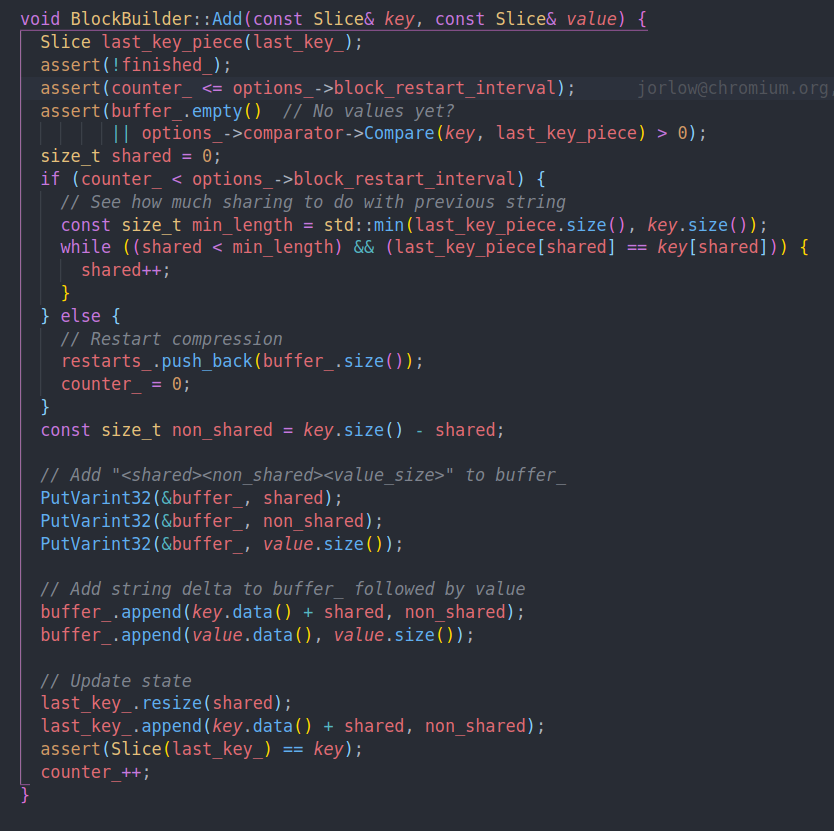
添加kv的时候,判断是否应该重设restart point。如果需要的话就添加restart point并重设counter
否则的话我们就根据last key计算一下共享的key
将非共享的key写入到buffer中。然后更新last key。用来下一次的判断。

文章评论